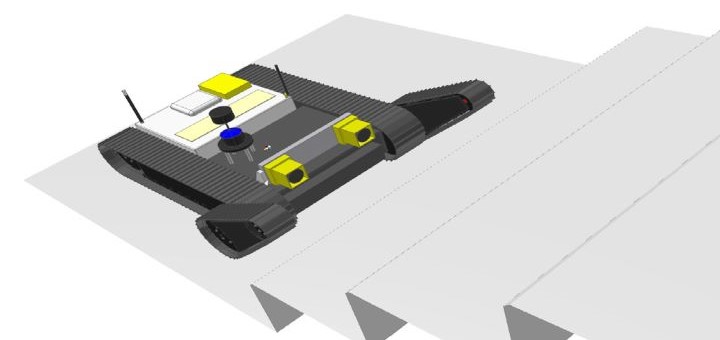
RecurDyn应用案例 汽车摩托车 混合动力汽车传动系统润滑油路优化旋转轮(驱动轴总成)的油带预测万向节防尘套耐久性优化减速器齿轮啮合振动的阶次跟踪摩托车发动机气门的优化设计货车运输中的路面不平度与货物的累积疲劳的关系鼓式制动系统的噪声和振动分析自行车链传动系统的自动化建模与仿真 电气元件 在初期研发阶段对不同断路器产品概念进行测试光电仪器设计初期的仿真验证多体仿真优化隔离开关太阳能帆板的开发和主动控制仿真洗衣机脱水的振动特性和减震装置的效果咖啡胶囊机容量提升设计硬盘及其缓冲材料的跌落仿真 通用机械 进行轴结构的线性振动分析提高钣金加工产能和精度的虚拟样机技术在托盘上堆放瓦楞纸箱 机器人 多体动力学仿真研究行星绞线机的运行场景基于人体模型的可穿戴机器人设计与仿真利用虚拟模型对谐波齿轮传动性能进行预测多履带式城市侦察机器人虚拟验证象鼻机器人的优化设计小型履带式装载机通过仿真分析来控制成本优化扭矩扳手的设计和标尺精度矿井提升机的刚柔耦合仿真 多履带式城市侦察机器人虚拟验证 研究产品:履带式城市侦察机器人分析目标:机器人爬楼梯性能评价 阅读全文 摘要 侦察机器人正在多种行驶环境中执行任务。其中,由于城市行驶环境中存在很多楼梯,侦察机器人的爬楼梯性能是重要因素之一。在爬楼梯的各种方法中,使用副履带的方法可以增加履带与楼梯接触的面积,提高接触力,提高爬楼梯性能。另外,在平地行驶时,将副履带向上旋转,提高一般行驶和旋转时的效率。开发该形式的侦察机器人的一个研究小组利用RecurDyn的履带工具包,轻松地对包含复杂履系统的机器人进行建模,并利用它有效地验证了爬楼梯性能。 欲知更多内容 联系专家